挪威生命科学大学的科学家们与明尼苏达大学算机科学系一起,合作开发了一款机器人,并已对其进行评测。该机器人用于收获种于塑料大棚桌台上的草莓。该机器人配有一款新型抓手,安装在工业臂上。工业臂又与RGB-D相机一起安装在移动底座上。这一新颖的电缆驱动的抓手可张开手指“吞下”水果。由于它的目标是果实而不是茎,仅需果实的定位便可进行采摘。抓手内部有一个容器,在采摘过程中收集草莓。
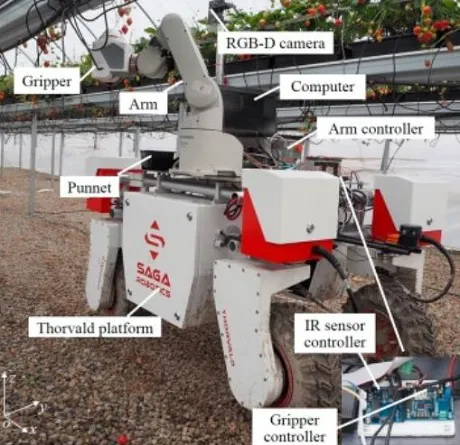
由于无需将每颗草莓放入小篓,采摘时间显著减少。视觉系统能够选择成熟并能够到的草莓。这些组件被集成到一个完整系统中,科学家对这一系统的性能进行了分析,其出发点是视觉系统的四个主要失败情况:未检测到、重复检测、不准确定位及分段失败。这一集成系统使机器人能通过操纵杆移动平台,连续采摘。
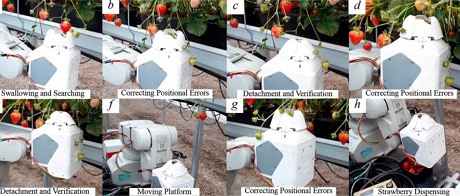
科学家已对该系统在农场上进行了评估,并分析了失败情况。每颗草莓的采摘周期为7.5秒,在农场环境下的成功率为53.6%。大多数失败情况出现在采摘簇状草莓时,在这一情况下,检测算法和抓手很难将草莓分离。
消息来源:Ya Xiong、Cheng Peng、Lars Grimstad、PålJohanFrom、Volkan Isler,《电缆驱动抓手草莓采摘机器人的开发和现场评估》,2019年,《农业中的计算机与电子学》,第157卷,第392-402页。