Cornell 的研究人员开发了一种软体机器人抓取器,它利用可拉伸的光纤传感器,通过触觉来评估水果的成熟度,从而实现草莓的无损采摘。该系统通过测量果实的硬度,并利用扭转运动将果实从藤蔓上取下。
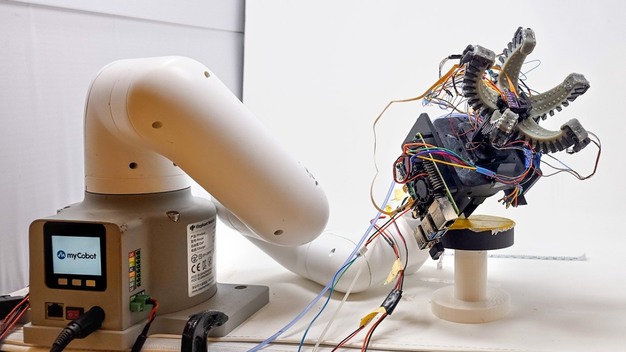
这项研究于 3 月 23 日发表在 Nature Communications 杂志上,由机械工程系 John F. Carr 讲席教授 Rob Shepherd 实验室的 Anand Mishra 领导完成。该团队还与园艺学教授 Marvin Pritts 合作,开发了该技术在浆果生产中的应用。
 © Cornell University
© Cornell University
"Cornell 最棒的地方在于我们是一所非常优秀的农业院校,正因如此,我们才能开拓出许多新的发展道路,"Shepherd 说道。"这让我们能够将机器人技术专长与农业优势完美结合。"
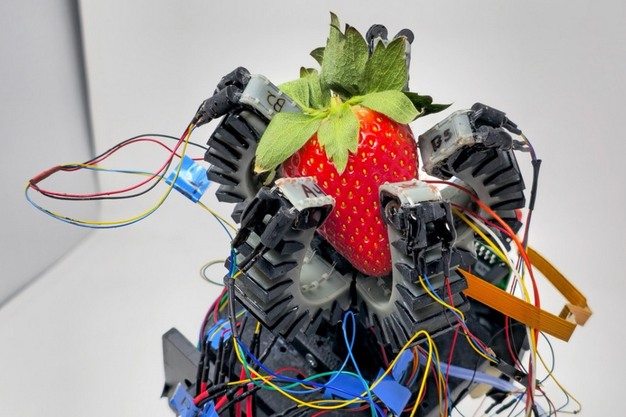
该机械臂配备了两个光纤传感器,分别用于测量曲率和压力。这使得系统能够估算形状并调整抓取力度,从而避免损伤果实。"光纤应变计与使用它们的机械臂具有相同的机械特性。这就好比果肉在感知果实,而不是通过单独的传感器,"Shepherd 解释道。
该系统以草莓为模型作物进行训练。"你可以通过颜色准确判断草莓是否成熟,"Shepherd 说。"因此,我们可以训练模型通过触觉来判断草莓是否成熟,然后通过观察颜色来验证模型的准确性。Anand 能够根据他测量的硬度准确判断是否是采摘草莓的最佳时机。"
果实被抓取后,行星齿轮机构会旋转夹爪,无需拉扯即可将果实取下。此外,该装置还集成了一个摄像头,用于识别被树叶遮挡的果实。
 © Cornell University
© Cornell University
该系统可应用于成熟度不易观察的作物,例如牛油果、凤梨和番木瓜。"番木瓜的问题在于,你无法判断它们何时成熟,而且它们成熟得非常快,如果你没在合适的时机采摘,就会错过它们,"Shepherd 说道。
研究人员指出,机器人系统可以支持多种作物的生产模式,并减少对农药和化肥的依赖。"机器人将使我们能够做一些目前经济上无法做到的事情,"Shepherd 说。"以这种方式管理农场非常复杂,而机器人可以让我们做到这一点。"
欲了解更多信息,请联系:
Becka Bowyer
Cornell University
电话:+1 607 220 4185
电子邮件:[email protected]
www.news.cornell.edu









